Abstract
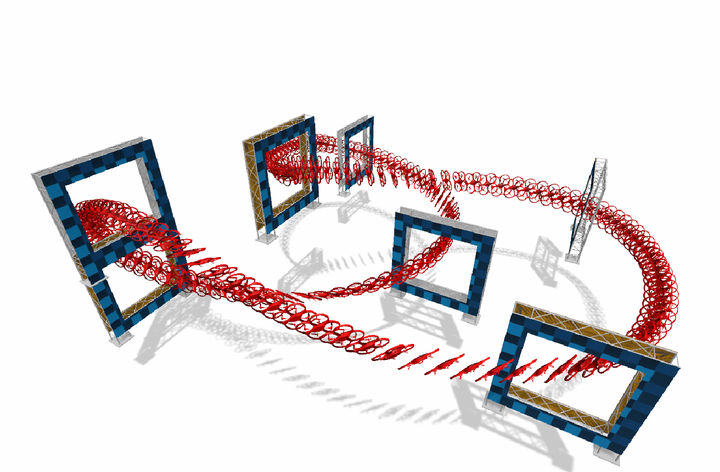
In many robotic tasks, such as autonomous drone racing, the goal is to travel through a set of waypoints as fast as possible. A key challenge for this task is planning the timeoptimal trajectory, which is typically solved by assuming perfect knowledge of the waypoints to pass in advance. The resulting solution is either highly specialized for a single-track layout, or suboptimal due to simplifying assumptions about the platform dynamics. In this work, a new approach to near-time-optimal trajectory generation for quadrotors is presented. Leveraging deep reinforcement learning and relative gate observations, our approach can compute near-time-optimal trajectories and adapt the trajectory to environment changes. Our method exhibits computational advantages over approaches based on trajectory optimization for non-trivial track configurations. The proposed approach is evaluated on a set of race tracks in simulation and the real world, achieving speeds of up to 60 km/h with a physical quadrotor.
Elia Kaufmann
Senior Autonomy Engineer
My research interests include robotics, control and machine learning.